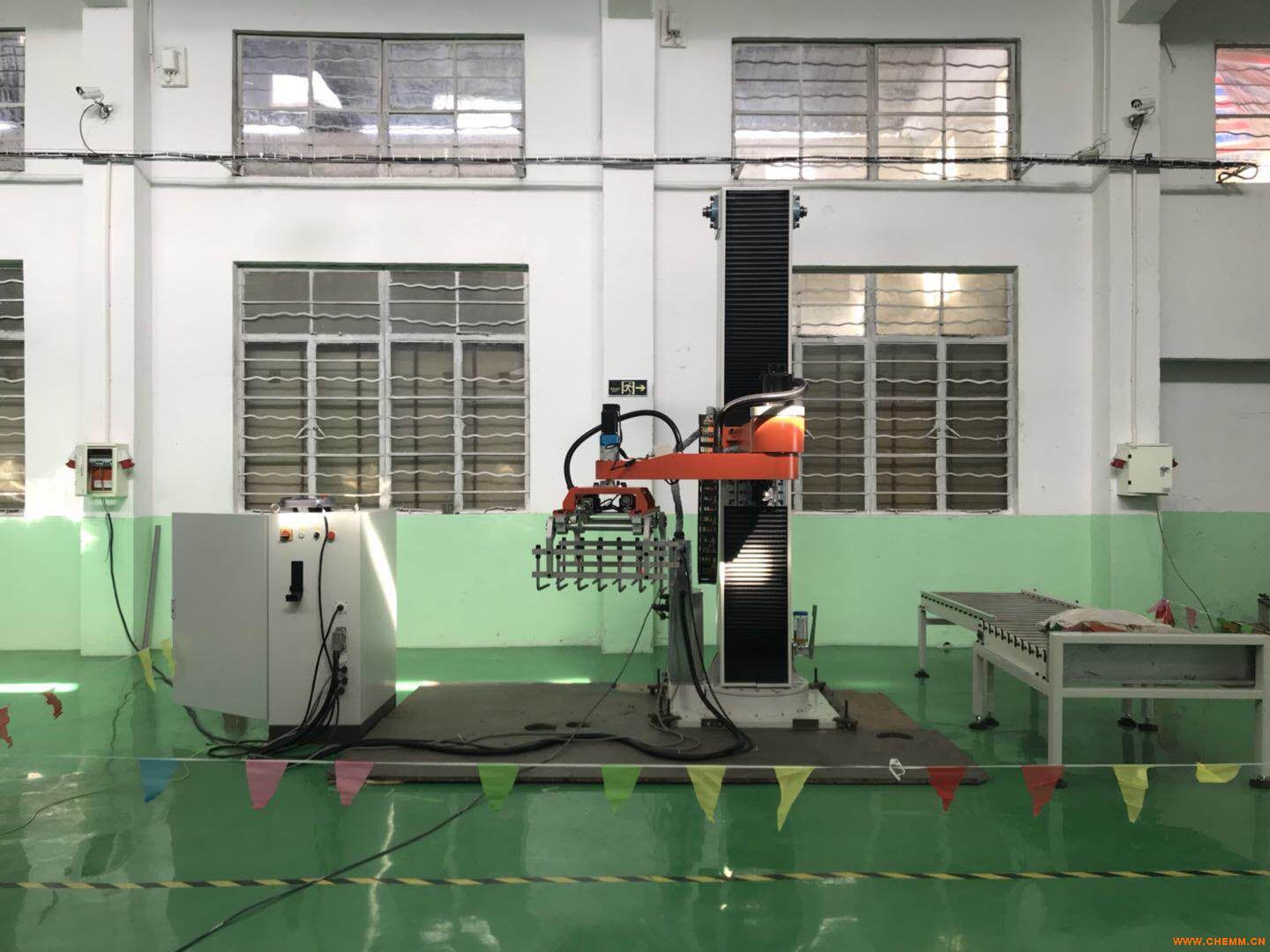
本文通过对机器人移动功能的研制和开发,为适应各种工作环境的不同要求而开发出各种移动机构。其中全方位轮可以实现高*定位、原地调整姿态和二维平面上任意连续轨迹的运动,具有一般的轮式移动机构无法取代的独特特性,对于研究移动机器人的自由行走具有重要愈义。综合分析了现有移动机器人的移动机构,移动运动特点,分析了其运动学特征;提出了移动机器人静态步行的稳定性判定方法,规划了机器人直线行走步态、定点转弯步态,以及跨越障碍物的行走步态;并采用PLC实现对步态的控制。
Copyright
©
2004-2013 中国
化工机械网 WWW.CHEMM.CN 江苏东网信息科技有限公司 版权所有
- 广告业务(图片广告、会员申请):400-667-8871
- 设备采购(设备采购、导购咨询):400-667-8871
- 信息编辑(会员审核、信息发布):400-667-8871
- 媒体合作( 展会、协会、杂志 ):400-667-8871
- 人力资源:400-667-8871
- 图文传真:0519-89897519